ROTATIONSRICHTUNGEN VON SONNENRAD, HÜLLRAD UND KORB
![]()
![]()
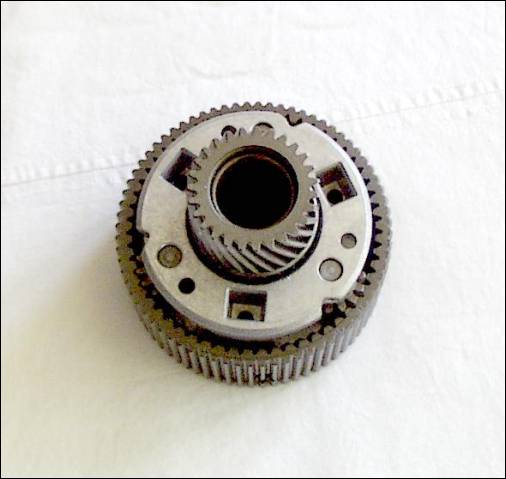 Abb.
1
Abb.
1
1 Sonnenrad
2 Korb
3 Hüllrad
ROT Rotationsrichtung des Hüllrades
BLAU Rotationsrichtung des Sonnenrades
GELB Rotationsrichtung des Korbes, an dem die Planetenräder befestigt sind
Angaben zur Verzahnung:
Bei allen Zahnrädern wurde eine schräg angeordnete Evolventenverzahnung verwendet.
Diese Verzahnungsform verbessert den Eingriff und damit das Verschleissverhalten der Zahnräder.
Darüber hinaus sind die akustischen Nebeneffekte geringer (Heulen, Pfeifen etc.)
Zähnezahlen:
1. Hüllrad / Innenverzahnung 57 Zähne
2. Sonnenrad / Außenverzahnung 27 Zähne
3. Planetenrad / Außenverzahnung 15 Zähne
Alle Zähnezahlen sind ungerade Zahlen, ein Quotient (Übersetzungsverhältnis) ist ein periodischer Dezimalbruch.
Geht man davon aus, dass der Antrieb über das Sonnenrad erfolgt, ergeben sich folgende Betrachtungen:
Innerhalb des vollständigen Getriebesatzes (Sonnenrad – Planetenräder – Hüllrad) findet eine zweimalige Drehzahländerung statt:
1. Fall: vom Sonnenrad zu den Planetenrädern i1
2. Fall: von den Planetenrädern zum Hüllrad i2
1. Fall
Das Sonnenrad treibt ein Planetenrad (in Wirklichkeit alle 3) an. Für die weitere Untersuchung wird allerdings nur ein Planetenrad benötigt.
Hierbei ist zu beachten, dass sich das Übersetzungsverhältnis i als Quotient aus der Zähnezahl z2 des angetriebenen Rades (Dividend) und der Zähnezahl z1 des Antriebsrades (Divisor) berechnet.
Somit ergibt sich folgende Berechnung:
![]()
Aus diesen Werten (i1 < 1) lässt sich auf eine Übersetzung ins Schnelle schließen, d.h. die Planetenräder drehen sich schneller als das Sonnenrad.
2. Fall
Das vom Sonnenrad angetriebene Planetenrad (in Wirklichkeit alle 3) treibt das Hüllrad an.
Auch hier ist die oben bereits näher erläuterte Berechnung durchzuführen.
Allerdings ist jetzt die Zähnezahl z1 des Antriebsrades die Zähnezahl des Planetenrades. Die Zähnezahl z2 des angetriebenen Rades ist jetzt die Zähnezahl des Hüllrades.
Somit ergibt sich folgende Berechnung:
![]()
Aus diesen Werten (i2 > 1) lässt sich auf eine Übersetzung ins Langsame schließen, d.h. das Hüllrad dreht sich langsamer als die Planetenräder.
Mit anderen Worten, der Korb mit den Planetenrädern dreht sich schneller als das Sonnenrad, das Hüllrad dreht sich allerdings wiederum langsamer als der Korb mit den Planetenrädern.
Das Gesamtübersetzungsverhältnis dieses Getriebes beträgt:
iG = i1 * i2 = 0,555... * 3,8 = 2,111…
Somit ist die Gesamtübersetzung iG eine Übersetzung ins Langsame.
Das Hüllrad dreht sich langsamer als das Sonnenrad, wobei die Drehzahl der Planetenräder letztlich relativ uninteressant bleibt.
Dieser Sachverhalt lässt sich recht leicht durch Auszählen der Umdrehungszahlen von Hüllrad und Sonnenrad nachvollziehen.
Aus dieser Tatsache ergeben sich die häufigsten Einsatzgebiete derartiger Getriebe:
- Reduziergetriebe in KFZ-Achsantrieben
- Reduziergetriebe in KFZ-Verteilergetrieben
- Wendegetriebe in KFZ-Schaltgetrieben
- Drehrichtungs- und Drehmomentenwandler
Von großem Vorteil sind die sehr geringe Baugröße dieser Getriebe und ihre hohe Verschleißfestigkeit.